Dynamic DES
Dynamic DES is a high-performance, real-time control plane for SimPy.
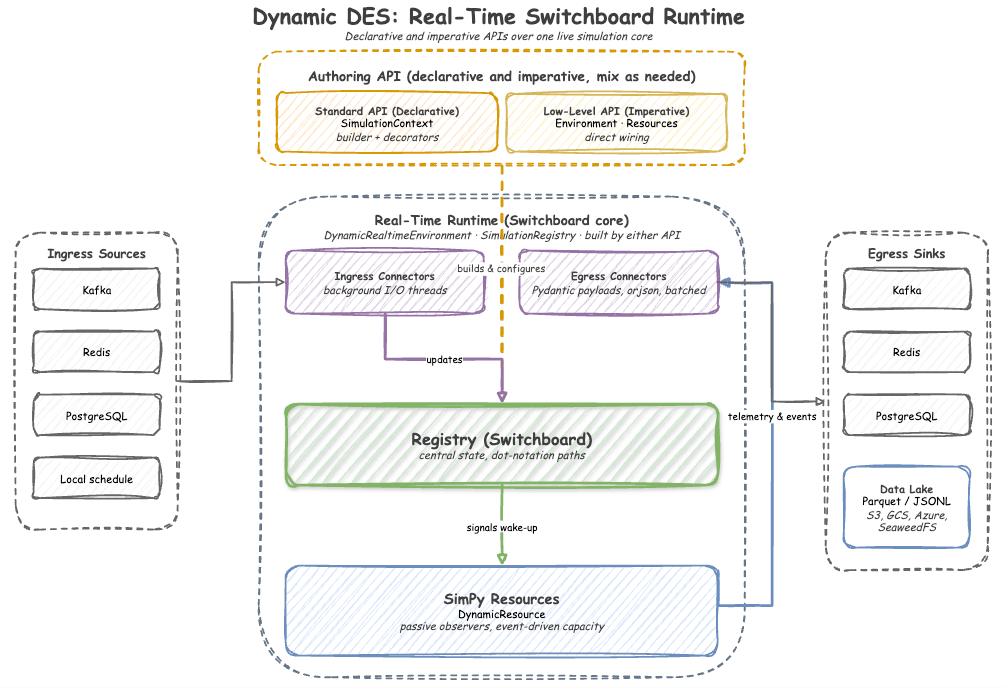
It bridges the gap between static discrete-event simulations and the live world by allowing you to update simulation parameters (arrivals, service times, capacities) and stream telemetry and events via Kafka, Redis, or PostgreSQL without stopping the simulation. It also transforms your models into synchronized forecasting engines by fast-forwarding through simulation time to predict future states or backfill Data Lakes with schema-enforced Parquet or JSONL files directly to AWS S3, Google Cloud Storage (GCS), Azure Blob, and SeaweedFS using PyArrow VFS.
Key Features
- ⚡ Real-Time Control: Synchronize SimPy with the system clock using
DynamicRealtimeEnvironment. - 🔗 Builder Pattern: Construct digital twins declaratively with
SimulationContextand decorators like@app.task. - 🔗 Dynamic Registry: Dynamic, path-based updates (e.g.,
Line_A.arrival.rate) that trigger instant logic changes. - 🛡️ Enterprise Ready: Native
**kwargspassthrough for SASL, mTLS, OAuth, and AWS IAM Kafka clusters. - 📦 Pluggable Serialization: Stream lightweight JSON by default, or map specific ML topics to lazy-loaded Avro/Schema Registry serializers.
- 🗄️ Data Lake Ready: Write chunked Parquet and JSONL datasets directly to object storage via PyArrow VFS, with built-in schema inference and drift prevention.
- 🦆 Pydantic Duck-Typing: Seamlessly publish strictly-typed Pydantic V2 models straight from your simulation logic.
- 📊 System Observability: Built-in lag monitoring to track simulation drift from real-world time.
Documentation Layout
- Getting Started: Quick installation and zero-setup demo commands.
- Basics (Tutorials):
- 1. Your First Factory (Local): Define a local factory lifecycle.
- 2. Adding Randomness and Rules: Add stochastic distributions and ingress scheduled capacity updates.
- 3. Going Distributed (Kafka): Connect standard simulation logic to live Kafka streams.
- Core Architecture:
- Standard vs. Low-Level Paradigms: Declarative vs. Imperative styles.
- Simulation Context: Chained builder details and temporal factor control.
- Realtime Environment: Temporal clocks and async background threads.
- Ingress and Egress Connectors: Input/output flows and tuning.
- Resources and Containers: Dynamic SimPy wrappers.
- API Reference:
- API Reference: Technical reference for all public classes.